Про-Аккерман и Анти-Аккерман.
Автор перевода: Владислав Ярополов.
Угол бокового увода - главная переменная в истории с Аккерманом. Угол бокового увода определяется различием между углом поворота колеса и действительным направлением движения колеса. Механизм создания угла бокового увода взаимодействует с целым рядом настроек подвески шасси. Однако, наш интерес в этой статье состоит во взаимодействии угла бокового увода с динамическим схождением.

Рисунок 1
Когда шасси совершает поворот на скорости, рулевая геометрия Аккермана существенно модифицируется углами бокового увода, как показано на Рисунке 1. При максимальном боковом ускорении можно ожидать величину углов бокового увода в диапазоне от 5 до 8 градусов. Низкопрофильные шины работают при меньших углах бокового увода. Самые жесткие шины могут работать при 2 градусах угла бокового увода. Шины для внедорожников могут работать вплоть до 40 градусов угла бокового увода.
При прохождении поворота, нагрузка на колеса изменяется со стороны на сторону, и углы бокового увода увеличиваются и уменьшаются в ответ на изменения. Вертикальная нагрузка на изменяется в соответствии с переносом веса, а также колеса нагружаются и разгружаются в ответ на ухабы на дорожной поверхности.
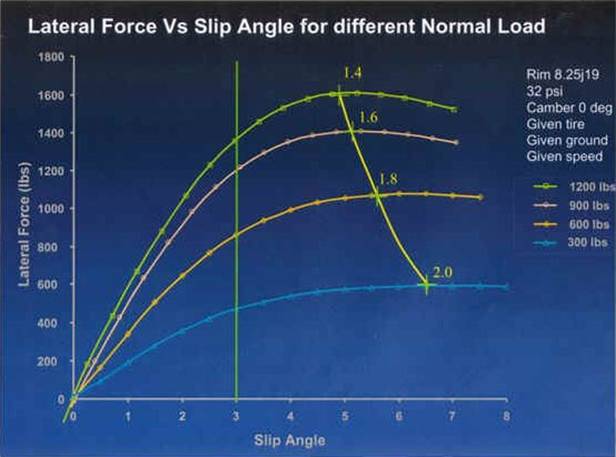
Рисунок 2
Рисунок 2 является примером графика зависимости боковых сил от угла бокового увода. Если мы собираемся получить представление, как работают углы схождения, подобные данные могут нам помочь. По мере нарастания боковых сил на шине, угол бокового увода быстро увеличивается. Плавное нарастание кривой характеризует отзывчивость шины на рулевое воздействие. Когда достигается максимальная боковая сила, кривая перегибается.
Если водитель не перегружает шины, он управляет на этом участке кривой. Если водитель нагружает шины больше, он использует более высокие углы бокового увода, со сходными боковыми силами (боковое ускорение, сцепление), но с возможностью перегрева шин.
График также показывает эффект изменения вертикальной нагрузки на шину. Нижняя кривая может представлять внутреннюю шину. Она имеет высокий коэффициент сцепления = 2. В этом случае боковая сила в два раза больше вертикальной нагрузки. Верхняя кривая может представлять внешнюю шину. Она имеет меньший коэффициент сцепления = 1,4, и ее боковая сила составляет только 1,4 от вертикальной нагрузки.
График показывает, что происходит при небольшой величине угле бокового увода и боковой силы, и как картина изменяется по мере приближения к пределу, при увеличении угла бокового увода и больших величинах переноса веса. Во-первых, интересно то, что по мере того, как переднее внешняя шина нагружается в повороте, она примет более высокий угол бокового увода, чем менее нагруженная внутренняя шина. Нагруженная шина будет иметь большее расхождение, чем менее нагруженная внутренняя шина. Мы ожидаем, что более нагруженная внешняя шина будет контролировать траекторию шасси в повороте, поэтому все имеющееся расхождение окажется на внутренней шине. Геометрия Аккермана также будет производить дополнительное расхождение.
Какое расхождение может выдержать шасси перед тем, как оно начнет волочить внутреннюю шину? Будет ли внутренняя шина терять сцепление? Очевидно, что прирост или потеря сцепления будет происходить на внутренней шине, в предположении, что сцепление внешней шины находится на максимуме, а шасси сбалансировано.
На этом этапе можно сделать ряд наблюдений:
* Предположим, что шасси проходит поворот при максимальном боковом ускорении и различие между углами бокового увода внешней и внутренней шины составляет 1 градус. Это эквивалентно увеличению расхождения. Это существенное изменение в расхождении, которое может повлиять на управляемость.
* По мере того, как шина перемещается по повороту, любые изменения в нагрузке на колесо, от рулевого воздействия или воздействия дорожной поверхности, будет приводить к изменению расхождения (вследствие изменения углов бокового увода). Эти изменения складываются с геометрией Аккермана и паразитным подруливаем на ухабах (bump steer), которые обусловлены геометрией подвески и рулевого управления. Весьма сложно визуализовать взаимозависимость углов бокового увода со всеми этими переменными. Но к счастью, похоже, что мы имеем достаточно большое окно, где сцепление внутренней шины будет находиться в приемлемом диапазоне.
Кривая на Рисунке 2 показывает достаточно постоянный уровень сцепления для легко нагруженной шины в диапазоне между 4 и 8 градусами. Это означает, что внутренняя шина может выдерживать достаточно большие вариации угла бокового увода, и по прежнему оставаться в районе максимального сцепления. Это означает, что в середине поворота, даже при больших углах расхождения, мы можем иметь почти максимальное сцепление на внутренней шине. Глядя на схождение и углы бокового увода, может показаться, что мы волочим внутреннюю шину, но это не так, пока мы удерживаемся в районе максимального сцепления.
* На входе в поворот, нам необходима большая точность в динамическом схождении. Первоначально, эффект Аккермана отсутствует, таким образом мы смотрим только на статическое схождение, плюс развивающиеся углы бокового увода.
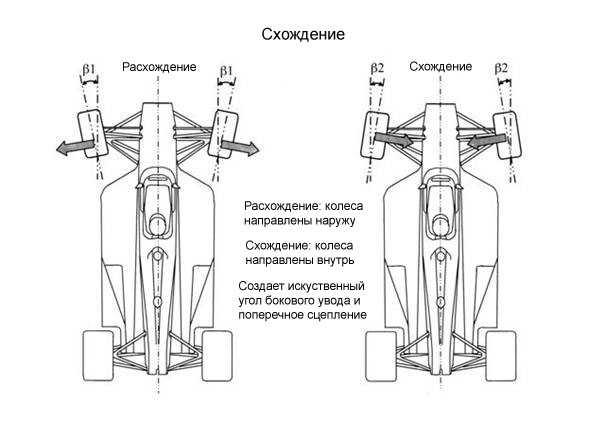
Рисунок 3
Статическое расхождение или схождение создает "искусственный" угол бокового увода на каждой передней шине и, следовательно, боковое сцепление. Посмотрите на рисунок 3. Расхождение может способствовать сцеплению внутренней шины. В частности, расхождение помогает компенсировать отрицательный развал на внутреннем колесе. Отрицательный развал может быть оптимизирован для внешнего колеса, но он всегда работает против вас на внутреннем колесе.
Для спортивного шасси, использующего расхождение, механизм прохождения поворота может выглядеть примерно так:
При входе в поворот, внутреннее колесо имеет расхождение и уже обладает небольшим углом бокового увода. Шине нагружена статическим весом плюс переносом веса от торможения, поэтому шина сразу отзывается,направляя шасси в поворот. Внешнее колесо также имеет расхождение, но вне верном направлении для поворота шасси. Поэтому, шина должна развить начальный угол бокового увода, а затем начать с нуля для развития угла бокового увода в правильном направлении. По мере того, как шасси начинает переносить вес в повороте, внешняя шина наращивает эффективность, поворачивая шасси внутрь поворота. Внутренняя шина начинает терять боковую силу, а внешняя шина по мере роста нагрузки наращивает боковую силу. В этот момент, относительное преимущество прироста развала еще больше увеличивает сцепление внешней шины.
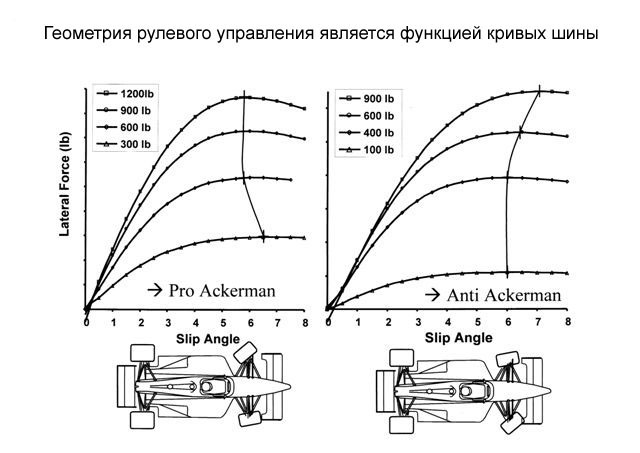
Рисунок 4
Предпочтительная геометрия рулевого управления является функцией графика кривых шины.
На Рисунке 4, если график кривых шины показывает смещение максимума боковой силы при малой нагрузке на шину в сторону увеличения углов бокового увода, это предполагает использование Про-Аккермана. Если график кривых шины показывает смещение максимума боковой силы при малой нагрузке на шину в сторону уменьшения углов бокового увода, тогда можно ожидать, что использование Анти-Аккермана даст лучшие результаты. В этом случае нам будет более выгодно снизить угол бокового вода на внутренней легко нагруженной шине, т.е. нам нужно получить динамическое схождение на внутреннем колесе.
Почему может быть полезен Анти-Аккерман?
Тестирование статического схождения дает следующие результаты:
* Статическое схождение дает преимущество в медленных крутых поворотах.
* Статическое расхождение дает преимущество в быстрых широких поворотах.
| Медленный поворот
| Быстрый поворот
| Статическое схождение
| +++
| -
| Статическое расхождение
| -
| +++
|
Универсальным решением может быть использование статического расхождения в комбинации с Анти-Аккерманом.
* Быстрые широкие повороты = небольшой угол поворота рулевого управления = расхождение остается практически неизменным.
* Медленные крутые повороты = большой угол поворота рулевого управления = следовательно, быстрый переход от расхождения к схождению колес.
Источник: http://www.smithees-racetech.com.au/ackerman.html |
